交通机器人融合创新研究院
一、研究院简介
交通机器人融合创新研究院(简称研究院)瞄准未来交通科技和区域经济社会发展需求,服务交通强国和制造强国,立足重庆市“416”科技创新布局和“33618”现代制造业集群体系,以“高科技锚定技术极限、高视野对标国际前沿、高目标服务产业跃迁”为起点,聚焦交通场景机器人技术创新需求,以机器人市场应用为突破口,抢占交通机器人技术制高点,驱动千亿级智能装备产业集群升级,创建具有行业与区域特色的交通领域“机器人+”应用场景,为未来交通科技发展提供重要支撑。研究院以“立足交通机器人细分领域,引领未来交通技术变革”为使命,构建共性技术支撑与场景专属创新并行的研发体系,研发多品类、谱系化、模块化交通机器人矩阵,形成“基础研究-场景验证-标准输出-产业反哺”创新闭环,打造“智能化、国际化、工程化、标准化”的交通机器人创新高地与成果转化基地。研究院拥有包括交通运输部青年科技英才、重庆市科技创新领军人才、重庆市巴渝学者、重庆市学术技术带头人后备人选在内的固定成员46人,其中教授18人,副教授20人。
二、组织机构
研究院构建“学校-研究院-企业”三级协同管理机制,实行在研究院管理委员会和学术委员会指导下的“1+3+N”组织架构。研究院院长由重庆市科技创新领军人才董绍江教授担任,常务副院长由交通运输部交通运输青年英才陈仁祥教授担任,并配备若干业务副院长。
三、建设背景与目标
发展先进制造业是培育新质生产力的重要支撑,机器人是“制造业皇冠顶端的明珠”。交通强国、制造强国等国家战略背景下,面向未来交通场景的智能机器人成为新一轮科技革命和产业变革的必然趋势,进一步强化“政产学研金服用”七位一体的科技创新生态模式,推动有组织科研和多学科融合创新,组建交通机器人融合创新研究院,打造具有行业与区域特色的交通机器人创新高地和人才培育高地。
建设目标:
技术策源:培育能够“占领学科前沿、引领学科发展、产生国际影响”的若干创新成果,突破具身智能、水陆空多栖集成等 “卡脖子”技术,提升源头创新能力。
学科建设:引育具有国际视野、富有创新精神的机器人研究团队,与国内顶尖实验室和头部企业合作共建,支撑机械工程学科建设与重庆交通大学双一流学科建设。
产业赋能:形成能够实现颠覆性创新、催生新产业的前沿技术,研发中高端交通机器人若干款,引育标杆企业,建成企业主导与协同创新的技术成果孵化基地。
四、定位与研究方向
瞄准未来交通科技和区域经济社会发展需求,打造具有行业与区域特色的交通机器人创新高地和人才培育高地。
研究方向:
交通智能机器人关键共性技术
交通基础设施建养机器人研发及应用
交通装备智能运维机器人研发及应用
五、代表性成果
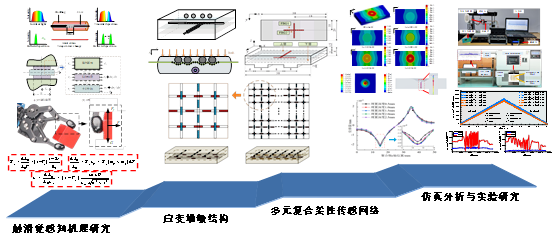
1、机器人高性能感知与驱传控关键技术
研发了三维力/振动加速度传感器,实现交互力和振动加速度高精度测量,支撑复杂装配环境中机器人精准控制和精细化作业。研究FBG柔性封装触滑热觉多参量复合感知机理,提出了空间交错互补级联3D构型多元复合柔性感知网络构建方法,设计了应变增敏的多信息感知单元,解决了触滑觉复合感知信号交叉敏感问题,空间感知灵敏度和分辨率提升30%。研发特种机器人驱传控一体化动力模组、自主感知规划与环境自适应运动控制技术,实现复杂环境巡检工程应用。承担国家、省部级项目20余项,发表学术论文80余篇、授权发明专利26件,软件著作权5件,获重庆市科技进步奖二等奖、中国公路学会科学技术二等奖等。
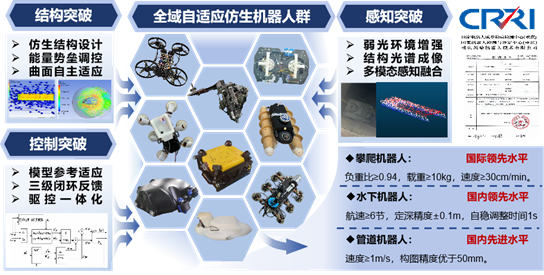
2、桥梁智能仿生机器人研发及应用
面向交通基础设施的非结构化场景检测,构建“仿生机构-智能感知-群智控制”三位一体的技术体系,以系统性突破检测可达性、感知精度和协同控制三大瓶颈,形成了全域自适应的仿生机器人集群设计、高精度多模态融合感知、机器人集群的高效协作和快速响应等关键技术,实现了多场景下的工程应用。承担国家、省部级项目10余项,发表学术论文40余篇、授权发明专利13件,软件著作权3件,获中国公路学会科学技术二等奖。
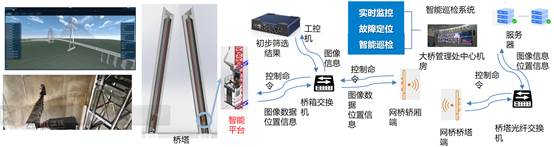
3、特大桥梁智能检养装备与机器人
面向特大桥梁塔内、梁底、梁内智能检养需求,提出了加权在线样本更新和改进转换模型的目标识别跟踪方法,实现了目标长时跟踪与检测,研发了特大桥梁检养智能装备与系统,在苏通大桥、深中通道等实现示范应用。获中国公路学会科学技术奖二等奖,特大桥塔内智能巡检装备(SC200 系列)评价为国际先进,承担科研项目5项,发表SCI/EI检索论文40余篇、授权发明专利9件、软著6件。